Multi-Scale Simulation Framework for Evaluating Large-Scale Automated Vehicle Deployment
 Co-Simulation for Large-Scale AV Deployment
Co-Simulation for Large-Scale AV DeploymentAbstract
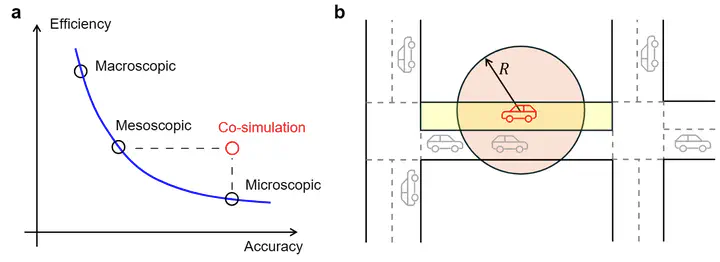
Traffic simulation provides a controllable, efficient, and cost-effective tool for testing and evaluating automated vehicle (AV) development. While many previous studies have focused on developing high-fidelity microscopic simulations to assess the safety performance of AVs, these simulations are typically limited in scale due to their substantial computational costs. To address this limitation, this paper proposes a co-simulation framework designed to evaluate the large-scale deployment of AVs for both safety and efficiency assessment. The framework employs a co-simulation approach in which road segments surrounding AVs are modeled using microscopic simulation, while other segments are handled through mesoscopic simulation. The primary challenge in this approach lies in ensuring consistency between simulations at different scales. In this paper, we formally define the consistency issues and propose methods to resolve them. By addressing these challenges, the proposed co-simulation framework accurately captures the interaction between AVs and background traffic, achieving significant computational efficiency without compromising accuracy. This extended abstract outlines the framework and presents a preliminary study. Future work will focus on scaling the framework to larger networks and addressing specific challenges in large-scale AV deployment, such as evaluating risks associated with cyberattacks.