OSaaS – Optimizing Traffic Signals as a Service
 Vehicle trajectory data (Credit to Zihao Wang)
Vehicle trajectory data (Credit to Zihao Wang)Overview
OSaaS (Optimizing Signals as a Service) is a traffic signal control system that leverages data from connected vehicles—cars that share their position and speed in real time—to automatically improve signal timing.
Unlike traditional systems that rely on expensive roadside detectors, OSaaS operates purely from vehicle data, making it scalable to every intersection.
Even with limited connected-vehicle adoption today (often below 10%), OSaaS can still infer full traffic conditions through a probabilistic model that learns traffic flow from sparse data. In field tests across Michigan, the system reduced delays and stops by up to 30%, showing that connected vehicle data can already deliver tangible benefits for everyday drivers.
A Simple Yet Powerful Model
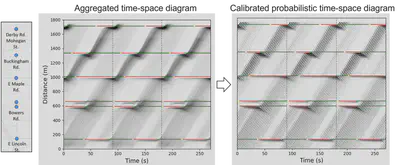
At the heart of OSaaS is the Probabilistic Time-Space (PTS) model—a minimalist yet effective way to represent how traffic moves through an intersection.
Instead of simulating every vehicle in detail, the model treats traffic as a queue of vehicles that are either stopped or moving. This simplification allows accurate predictions even when only a handful of vehicles report their data.
The model transforms these observations into a probabilistic “time-space” map of vehicle movements, helping traffic engineers visualize and optimize intersection operations without physical sensors.
From Model to Deployment
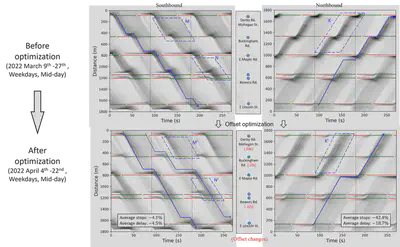
We partnered with the Road Commission for Oakland County (RCOC) to test OSaaS across 34 intersections in Birmingham, Michigan. Two corridors and two isolated intersections were re-timed using the system’s recommendations, resulting in 20–30% reductions in average delays and stops.
These improvements show that large-scale signal optimization can be achieved without additional roadside hardware, paving the way for city- or county-wide deployment through connected vehicle data alone.
Impact and Recognition
OSaaS represents one of the first real-world demonstrations of using connected vehicle data to optimize traffic control at scale. The approach combines theoretical innovation, practical deployment, and measurable community benefits.
In 2025, the system expanded countywide through the USDOT SMART Grant partnership with RCOC, now optimizing corridors such as 8 Mile Road and 12 Mile Road with up to 40% reductions in delays and stops. The rollout, supported by the spin-off startup Connected Traffic Intelligence, has drawn widespread public attention and positive community impact.
Recent coverage includes:
- Faster commutes in Oakland County—rollout underway for U-M-designed traffic flow system (U-M News, 2025)
- University of Michigan researchers use vehicle GPS data to cut traffic delays in Oakland County (ClickOnDetroit, 2025)
- University of Michigan researchers use vehicle GPS data to cut traffic delays in Oakland County (Dearborn.org, 2025)
Earlier national coverage of OSaaS includes:
- The Smart, Cheap Fix for Slow, Dumb Traffic Lights – Wall Street Journal
- Red, yellow, green … and white? Smarter vehicles could mean big changes for the traffic light – Associated Press
- Improving Traffic Signal Timing with a Handful of Connected Vehicles – U-M News
- Cutting-edge technology slashes wait times at red lights in Oakland County – Local 4+ Detroit
- Harnessing Connected Vehicle Data – Roads and Bridges
Patents and Technology Transfer
Patent: Henry Xianghong Liu, Xingmin Wang, Zachary Jerome, Vivek Vijaya Kumar, Fan Bai, Zihao Wang, and Shengyin Shen.
Optimizing Traffic Signals Using Partially Observed Vehicle Trajectory Data.
US Patent 12,367,764 B2, published as US20240363006A1, granted on July 22, 2025, priority from US Application 18/308,996 (filed April 28, 2023).
Assignees: University of Michigan System and GM Global Technology Operations LLC.
Status: Active (expires December 28, 2043).Licensing: Technology licensed to General Motors through the University of Michigan’s technology transfer program.
Next Steps: Further development through the USDOT SMART Grants and commercialization via Connected Traffic Intelligence.
Related Publications
PDF Cite Video DOI WSJ UofM News AP news Local 4+ Roads and Bridges